Table of Contents
Four-Axis Joystick and Wheel Operation
Precise manual control of micromanipulators, or other multi-axis instruments is possible with the MS-2000’s fine resolution joystick or command encoder wheel. Depending upon the application or configuration, the user may wish to use the joystick or the command wheel as the manual input device for a particular axis.
Manual Input Device Selection
Systems with four axes of controlled motion utilize the joystick and the command wheel to control selected axes. The X/Y axes are controlled by the joystick. The @ button on the controller toggles control between the remaining two axes to the command encoder wheel.
Manual Device Speed Control
The joystick has a two speed ranges. Momentarily pressing the button on top of the joystick toggles between the fast and slow ranges. To give further control, the speed of motion is proportional to the joystick deflection. The maximum speed settings for the two joystick speed ranges, and the relative speed setting for the command wheel, are programmable by the user using the JSSPD command. The command encoder wheel also has two speed ranges. The front panel rocker switch controls the fast and slow ranges.
LCD Display
The axis controlled by the command wheel shows a ‘W’ in the status location on the LCD display. (Note: The axis status ‘B’-busy or ‘M’-motor will overwrite the ‘W’ if the axis is actively positioning.) The speed range for the joystick is indicated by a lowercase ‘f’ or ‘s’ for the fast or slow speeds. Similarly, for the axes controlled by the code wheel, the speed range is shown by an uppercase ‘F’ or ‘S’.
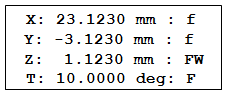
- X&Y axes controlled by joystick (fast speed range)
- Z-axis controlled by command wheel
- Theta-axis not under manual control (fast speed range)

- X&Y axes controlled by joystick (fast speed range)
- Z-axis controlled by joystick
- Theta-axis controlled by command wheel (slow speed range)